Scientific Exploration of Challenging Planetary Analog Environments with a Team of Legged Robots
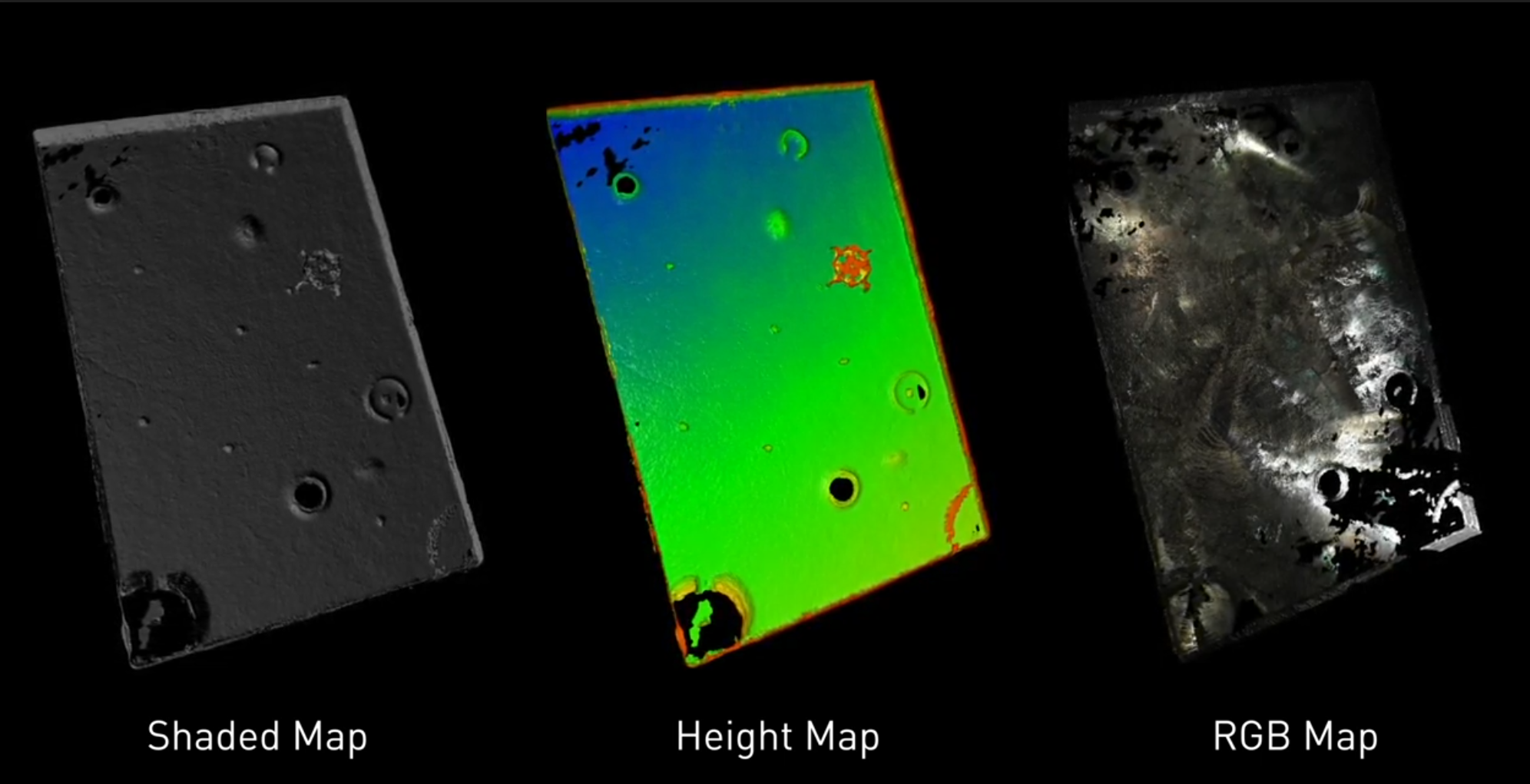 Dense Mesh Maps
Dense Mesh Maps
Abstract
This article presents a team of legged robots for exploration missions in challenging planetary analog environments. We equipped the robots with an efficient locomotion controller, a mapping pipeline for online and post-mission visualization, semantic and instance segmentation to highlight scientific targets, and advanced payloads for remote and in-situ scientific investigation.
Turcan Tuna
PhD Candidate at Robotic Systems Lab, ETH Zurich
My research mainly focuses on incorporating state-of-the-art optimization and machine learning approaches into robust localization and mapping frameworks. Specifically, I specialize in robust localization and perception in degenerate and challenging environments utilizing optimization and learning based methods. Additionally, I am highly interested in multi-modal fast volumetric mapping and efficient and consistent local and global representations.